
在过程控制的反馈系统中,如果纯滞后时间或增益发生较大随机变化,那么在试图减少偏差时,反馈作用将失效。此时过程变量远离其操作范围反馈控制器几乎不可能对设定值进行准确快速的跟踪。其结果是,该过程的波动变得不可接受。
前馈控制用于在这些干扰有机会进入系统并扰乱过程变量之前检测并纠正这些干扰。必须记住,前馈控制不考虑过程变量。它对已知过程干扰的感知或测量做出反应,使其成为补偿和协调控制,以使干扰和控制的影响互相抵消。基于图1所示不变性原理的前馈控制的理想控制器形式会非常复杂,往往和干扰通道和控制通道的动态特性相关。在实际使用中,为了简化和增强鲁棒性,常采用最简单的静态前馈形式。
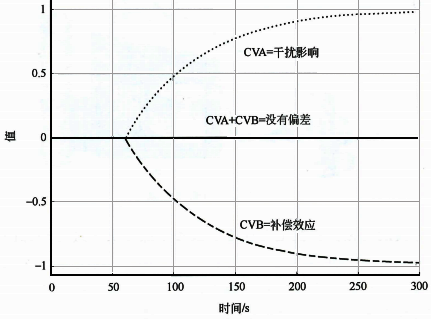
图1 前馈的不变性原理
前馈主要用于防止偏差(过程干扰)进入或干扰过程系统内的控制回路。反馈用于纠正闭环控制系统中检测到的由各种过程干扰引起的所有偏差。
手动前馈控制与串级控制一样,前馈控制在项目管理或者社会管理工作中也有类比。如果主管是部门的负责人,向下属发出指令以完成重要任务,那么前馈系统就是当有人通知主管即将影响部门的重要变化时,主管可以采取先发制人的措施,在完全感受到其影响之前更好地管理这种变化。如果这些预测信息是准确的,并且主管的响应是适当的,那么变化的任何负面影响将被最小化到不需要被动调整的程度。换句话说,前馈控制行动将可能发生的危机转化为微不足道的小事件。
1、手动前馈控制
前馈控制与反馈控制是完全不同的概念。前馈控制属于开环控制,而反馈控制属于闭环控制。手动前馈控制如图2所示。干扰进入过程后,操作员会对其进行检测和测量。然后,操作员根据对过程的了解,改变操纵变量,使干扰对系统的影响降至最低。前馈控制和反馈控制是人员干预系统的两个主要控制模式,如果决策是基于干扰做出的属于前馈控制,如果决策是基于过程变量或偏差做出的则属于反馈控制。

图2 手动前馈控制
这种形式的前馈控制在很大程度上依赖于操作员对过程动态的了解。如果操作员出错或无法预测干扰,则过程变量将偏离其设定值。如果前馈控制是唯一的控制,则将存在未修正的偏差,所以在实际情况中大多都是基于偏差的反馈控制和基于干扰补偿的前馈控制联合使用。
2、自动前馈控制
自动前馈控制检测并测量即将进入过程的干扰,然后前馈控制器根据这些干扰对过程变量的影响,改变PID控制器输出。
前馈控制虽然是一个非常吸引人的概念,但是前馈控制必须考虑干扰对过程变量的所有确切影响。前馈控制对系统设计者和操作员都提出了很高的要求,要从数学上分析和理解扰动对相关过程的影响。因此,前馈控制通常只适用于更重要、更关键的控制回路。
单独的前馈控制很少使用。更常见的是,前馈控制嵌入反馈控制回路中,通过最小化主要过程干扰的影响来显著改进控制性能,再通过反馈消除其他干扰造成的稳态偏差。重要的是要记住,前馈控制主要是为了减少或消除过程反应时间和任何可测过程变量变化的影响。
前馈控制器可能只需要执行简单(开-关)控制,也可能需要高阶数学计算。由于前馈控制器的要求差异很大,因此可以将其视为功能控制块。前馈控制的范围从简单的开关控制到超前/滞后(微分和积分函数)和计时块。前馈的工作范围几乎是无限的,因为大多数系统允许前馈控制作为基于软件的数学函数进行“编程”。前馈的成功则取决于对扰动的性质和幅度要有精确理解和测量,否则可能弄巧成拙。
动态前馈需要根据过程干扰通道和控制通道的动态特性加以确定,其结构往往比较复杂,而且严重依赖于模型参数的准确性。而静态前馈是指前馈控制为静态特性,是由干扰通道的增益和控制通道的增益的比值决定的。静态前馈的作用是使前馈干扰对过程变量的稳态影响被基本抵消,而不考虑其动态特性,将扰动的动态特性交给PID反馈控制处理,这是因为静态前馈已经把前馈的大部分效果都实现了。动态前馈既复杂又不可靠,在实际应用中较少使用。当过程干扰通道和控制通道的动态特性比较接近时可以直接使用静态前馈,这也是实际过程中使用前馈控制的大部分场合。






