




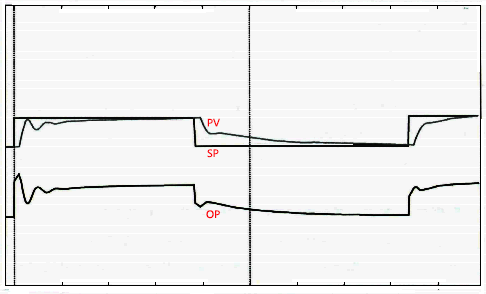
图1控制回路设定值阶跃响应趋势图
1、区分过程变量、设定值和控制器输出。图中都是平直变化的线肯定是设定值。剩下的两条线中,在设定值阶跃变化时首先变化的线是PID控制器输出,另外一条平滑变化的就是过程变量。
①“靠近的两条线是设定值和过程变量,其中平直的折线是设定值,平滑的曲线是过程变量。”这种说法是错误的,因为常见的控制系统每条曲线都可以设置独立的显示范围,靠近的两条线可能是曲线显示设置造成的。
②PID控制算法形式不同时,在设定值阶跃变化时,PID控制器输出可能也没有快速变化,但是一定是PID控制器输出先变化过程变量才开始变化。
2、该控制回路处于闭环自动控制模式,设定值阶跃变化时PID控制器输出会相应变化。如果控制回路处于手动控制模式,则设定值不跟踪时设定值直线不变或者设定值跟踪时设定值和过程变化重合。
3、设定值阶跃变化平直,该回路应该是主回路或者是单回路。
4、PID控制器输出减少时过程变量减少,所以被控对象正作用。由于PID控制器作用要是被控对象的镜像,所以控制器反作用。
5、该控制器是标准PID形式。设定值阶跃变化时PID控制器输出由于偏差突然变化,控制器输出会快速变化。如果是比例微分先行或者比例先行,则偏差突然变化控制器输出不会快速变化。
6、被控对象是个自衡对象。因为设定值阶跃变化稳定后,控制器输出的稳态值发生了大的变化。
7、由于设定值阶跃变化的响应曲线有明显变化,在设定值阶跃变化之间肯定调整了PID参数。
8、通过试凑可以改善控制回路的性能,但是最优的PID参数可能需要多次试验验证才能得到。
9、最终的PID参数更合理。因为最后一次设定值阶跃变化时,控制器表现为PID控制器输出有超调无振荡,过程变量无超调,接近最佳闭环性能。而第一次设定值阶跃变化,PID控制器输出有振荡,过程变量也有振荡。由于曲线还有拖尾现象,所以积分作用也不够强。
10、根据第一次设定值阶跃变化的响应曲线,可以发现:
①由于PID控制器输出有振荡,而且同相位,所以PID控制器的比例作用太强了;
②虽然过程变量振荡,但是看起来有拖尾现象,积分作用还是弱。
整定后的设定值阶跃响应见图1的右侧。根据闭环响应曲线进行分析并整定,有时候也能得到满意的控制性能。根据响应曲线对正在使用的控制系统进行判断并整定,是试凑法PID参数整定的主要应用场景。如果控制系统从来没有投用过,由于试凑法效率太低,不建议使用试凑法进行PID参数整定。