




在振荡控制回路中,重点是要观察过程变量和PID控制器输出的峰谷时间的振荡相位关系。如果PID控制器输出处于峰谷时的时间点,过程变量也差不多同时处于峰或谷,则可能是比例作用太强引起的。将比例增益减半往往振荡就会逐渐消失,如果比例增益减半后振荡幅度反而变大,则说明有周期性外部扰动影响该控制回路。相反地,如果过程变量与PID控制器输出在明显不同的时间点达到波峰或波谷,则可能是积分作用太强造成的。将积分时间翻倍往往振荡就会逐渐消失。将积分时间设置为峰值到峰值的振荡周期则更保守和安全。
如图1所示,如果PID控制器输出和过程变量同时达到极值(波峰或波谷),即两者同相位振荡,通常是由比例增益过强引起的。比例作用太强引起的振荡可以总结为:
波峰波谷同时刻,升降同时同拐点;
波动周期都一样,静态偏差没法办。
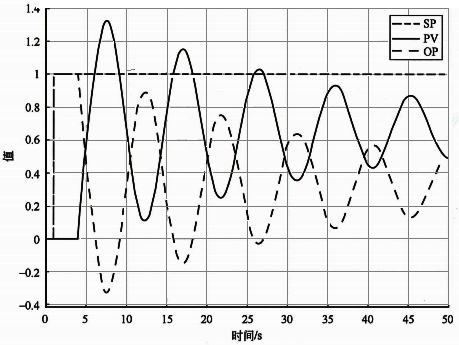
图1 比例作用太强引起的振荡
如图2所示,过程变量与PID控制器输出在明显不同的时间点达到波峰或波谷,即两者异相位振荡,则可能是积分作用太强引起的。积分作用太强引起的振荡可以总结为:
极值中间同时刻,此消彼长异相位;
积分作用适当用,消除余差不波动。

图2 积分作用太强引起的振荡
如图3所示,如果过程变量呈方波形式振荡,而PID控制器输出呈锯齿形状振荡,原因很可能是阀门存在非线性,如黏滞或静摩擦。另一个原因可能是PID控制器输出达到饱和点,例如全关或全开。如果调节阀上没有定位器,也可能存在滞后问题。当存在滞后时,PID控制器输出上升,阀门位置可能偏低,但控制输出下降,阀门位置可能偏高。在这些情况下,问题出在设备上而不是PID控制器参数。一般来说,当过程变量振荡但形状不是平滑曲线时,很可能是设备问题。这种情况下首先应该对设备进行维修减少非线性。如果PID控制器输出和过程变量的动态特性比较缓慢,通过和更快的副过程变量组成串级控制,也可能显著改善控制性能。

图5 终控制元件非线性引起的振荡