




在生产过程测量装置的高级化、高速化、复杂化、灵活性、集中化的过程中,作为最基本的控制算法,由以前采用PID控制到应用微处理器的数字调节器的出现,各种PID算法层出不穷,2自由度PID控制也是这些控制算法中的一种。
经典PID控制在实际应用中还是存在缺点的:在实际的PID控制系统中虽然存在(抑制外部扰动最佳控制常数)和(跟踪给定值最佳控制常数)2种类型的最佳控制常数, 但经典PID控制是只能设定1种类型控制常数的1自由度PID度控制方式。因此,如果设定控制常数使跟踪给定值特性为最佳,则抑制外部扰动特性就变差(不好),若设定控制常数使抑制外部扰动钱性成为最佳, 则跟踪给定值特性就成为振荡的。因此,只好在运行中途进行设定,任其控制性能不佳。
昌晖仪表为了消除经典PID控制所具有的这些本质缺点,把(抑制外部扰动最佳控制常数)和(跟踪给定值最佳控制常数)的2种类型的控制常数独立进行设定,而且必需调节的参数是同一个数,从而研制了与以前的PID控制相比调节方法简单、控制性能有极大提高的2自由度PID控制方式,并在YR-RJD系列通用温控器中实用,在温度、流量、压力等过程控制中取得好的控制效果。

2自由度PID控制的功能必须具备在前面论述的自动调节、自适应控制和各种超前(前馈)控制 等一切控制系统的基本功能。如果过程控制使用2自由度PID控制调节方式,对于被控对象的各种变化,由于控制回路所具有的衰减特性而使变化被消除,所以可使装置的运行特性发生改变。
昌晖仪表在介绍2自由度PID控制方式的前先说说导前微分控制方式。在数字控制中广泛应用的测量值微分超前型导前微分PID控制,这种算法与一般控制偏差的PID控制相比,为了防止给定值设定变化时微分突变,对控制偏差进行PI运算,微分仅对PV(过程变量)产生动作。这种导前微分PID控制系统的基本功能有:
①对于外部扰 动变化的抑制性。
②对于给定值变化的跟踪性。
但对于这两个功能,控制常数(PID参数)的最佳值不是一种,而是存在两种,即有抑制外部扰动最佳控制常数,也有跟踪给定值最佳控制常数
控制常数和控制响应的关系
如前所述,虽然在PID控制系统中存在2种类型的最佳控制常数,但以前的1自由度PID控制方式只能设定1种类型的最佳控制常数。图1反映当设定抑制外部扰动最佳控制常数时,跟踪给定值特性的变化情况;图2反映当设定跟踪给定值最佳控制常数
时,抑制外部扰动特性的变化情况。


图1 以前的PID控制重视干扰响应则目标值响应就变差 图2 重视目标值响则应干扰响应就变差
由图1和图2可明显地看出, 若设定控制常数使抑制外部扰动特性为最佳, 则跟踪给定值特性就变成振荡的,反之,若设定控制常数使跟踪给定值特性为最佳,则抑制外部扰动特性变得平缓。
在以前的PID控制中,因为不能设定控制常数使跟踪给定值和抑制外部扰动这两个方面都成为最佳,所以,必须把控制常数设定在两种特定的妥协点上,让它具有适当的控制特性,这一点有待于改善。

图3 2自由度PID控制可同时满足目标值响应和干扰响应的控制性能的动作
图3反映的是2自由度PID控制兼顾目标值响应和干扰响应的示意图。
实现2自由度PID控制的方法
实现2自由度PID控制方法很多,昌晖仪表介绍一种以给定值滤波器实现2自由度PID控制的方法。选用给定值滤波器实现2自由度PID控制有以下原因:
①它与数字控制系统中被广泛应用的测量值微分超前形PID控制算法很相似,表达式的展开很简明。
②因为它仅附加上给定值滤波器,所以容易适用于已经设定的温控器。
③向偏差平方形PID控制、附加间隙的PID控制等控制算法的相应转换容易。
总之,给定值滤波器2自由度PID控制方式是通用的,它有很好的发展性。
2自由度控制的特征和应用的优点
昌晖仪表把2自由度PID控制的特征归纳如下:
①可同时实现PID控制的调节方法的简单化和控制性能的提高。
②串级控制的段数(n) 越大,效果越好(nn倍)。
③构造简单,容易理解,容易适用于已经设立的系统。
④通过参数α、β和γ的设定,可任意的实现多种构造的PID控制。
给定滤波器H(S)在实现2自由度PID控制时的α、β、γ推荐值
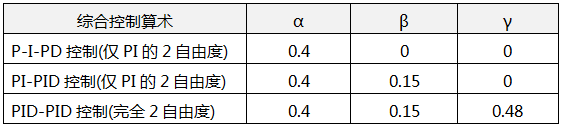
⑤通过全面的应用,可实现装置设备运行特性的革新。
⑥可通过以前的PID控制方式来替换它。